Water Bobot
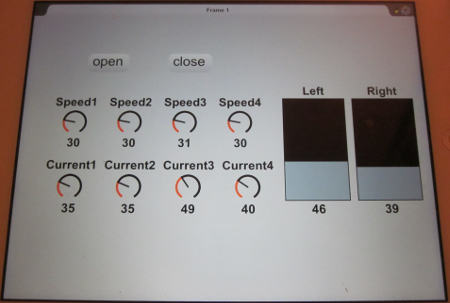
I assembled this project using the Rover 5. It uses an Arduino for the low-level control (current balancing, speed control) and a Raspberry Pi to receive OSC messages.
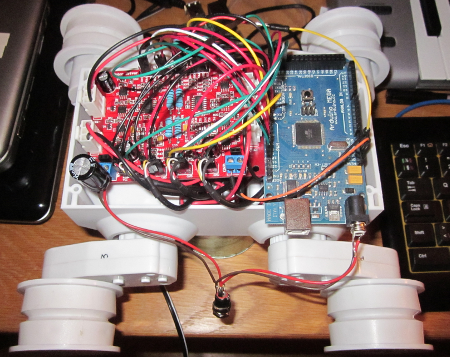
Rover 5 controlled with Arduino Mega
I prototyped the whole thing with Max, but the final version uses PD in the Raspberry Pi. It also works with Mira.